asp.net
web安全
硬件工程
Toast
题集
引用
USB
位置编码
armv9
protobuf
多模态
dcl语言
分布式存储技术
桌面聊天系统
基本指令
敖丙
虚拟主机
risc-v
时序选择器
控制浏览器的方式
Cartographer
2024/4/11 15:57:53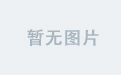
(02)Cartographer源码无死角解析-(16) SensorBridge→Rigid3(刚体变换)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(10) 配置文件加载1→主体框架分析LoadOptions()
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …
(02)Cartographer源码无死角解析-(12) Node类初探→构造函数与开始轨迹
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
(02)Cartographer源码无死角解析-(39) PoseExtrapolator→ExtrapolatePose()、ExtrapolatePosesWithGravity() 等成员函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(01)ORB-SLAM2源码无死角解析-(61) 闭环线程→闭环矫正: CorrectLoop→全代码注释
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(02)Cartographer源码无死角解析-(15) Node::AddTrajectory()→回调函数之数据流向分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(18) SensorBridge→landmark、Imu、GPS 数据坐标系变换
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(24) Collator类与数据队列OrderedMultiQueue简介
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(14) Node::AddTrajectory()→订阅话题与注册回调函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(49) 2D点云扫描匹配→相关性暴力匹配1:SearchParameters
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
(02)Cartographer源码无死角解析-(42) 2D栅格地图→Submap、Submap2D、MapLimits
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(38) PoseExtrapolator→AdvanceImuTracker()、ImuTracker姿态推断
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
(02)Cartographer源码无死角解析-(34) LocalTrajectoryBuilder3D→3D点云数据处理,大致流程梳理
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
(02)Cartographer源码无死角解析-(37) PoseExtrapolator→AddPose()、旋转向量(求导)变换成角速度
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…

(02)Cartographer源码无死角解析-(47) 2D栅格地图→总体流程梳理与总结,及核心关键CastRays()讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(05) 程序运行常见错误与解决→模拟错误
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正…

(02)Cartographer源码无死角解析-(02) ROS基础讲解→记录编译过程及常用指令
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …
(02)Cartographer源码无死角解析-(25) 阻塞队列BlockingQueue,与OrderedMultiQueue成员函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(26) OrderedMultiQueue::Dispatch()→数据排序分发
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(54) 2D后端优化→PoseGraphInterface、PoseGraph、PoseGraph2D::AddNode()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(75) 2D后端优化→整体复盘,理解后端优化核心思想
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…
(02)Cartographer源码无死角解析-(28) GlobalTrajectoryBuilder构建过程与数据转发前后端
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(30) LocalTrajectoryBuilder2D::AddRangeData()→激光雷达运动畸变较正
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(22) 传感器数据分发→CollatedTrajectoryBuilder
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(72) 2D后端优化→OptimizationProblem2D-约束残差、landmark残差
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…

(02)Cartographer源码无死角解析-(56) 2D后端优化→class MapById、MapById::lower_bound
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(16) SensorBridge→回调函数之数据流向分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下(有兴趣的朋友可关注计算机视觉life 进行学习): (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(02)Cartographer源码无死角解析-(09) gflags与glog简介、及其main函数讲解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…

(02)Cartographer源码无死角解析-(48) 2D点云扫描匹配→扫描匹配基本原理讲解,代码总体框架梳理AddAccumulatedRangeData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(17) SensorBridge→里程计数据坐标系变换与TfBridge分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(31) LocalTrajectoryBuilder2D::AddRangeData()→点云数据重力对齐,Z轴过滤
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
(02)Cartographer源码无死角解析-(36) PoseExtrapolator→AddImuData()、AddOdometryData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(23) 传感器数据类型自动推断与数据利用率计算
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(36) PoseExtrapolator→AddImuData()、TrimOdometryData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

Cartographer自定义lua参数的方法
Cartographer中, 配置参数大多数都是从lua文件中得到的, 不是像其他的开源框架大多使用xml等文件进行参数配置. 假如我们要配置一个名字是rotation_condition的配置参数在pose_graph_2d.cc中, 想要使用方法为
options_.translation_condition()配置步骤如下:
1. 修改proto文件…

双机 Cartogtapher 建图文件配置
双机cartogtapher建图
最近在做硕士毕设的最后一个实验,其中涉及到多机建图,经过调研最终采用cartographer建图算法,其中配置多机建图的文件有些麻烦,特此博客以记录
非常感谢我的同门 ”叶少“ 山上的稻草人-CSDN博客的帮助&am…
(02)Cartographer源码无死角解析-(20) MapBuilder→MapBuilder()构造函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
(02)Cartographer源码无死角解析-(00)目录_最新无死角讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(02)Cartographer源码无死角解析链接如下(有兴趣的朋友可关注计算机视觉life 进行学习): (02)Cartographer源码无死角解析-(00)目录_最新无死角讲解:https://mp.csdn.net/mp_blo…
Cartographer实现双雷达建图
Urdf修改
<?xml version="1.0" ?>
<robot name="robot"><link name="base_link" /><link name="laser_1" /><link name="laser_2" /><link name="laser_link" /><join…
cartographer 学习
cartographer 学习
编译并运行代码
由于cartographer整体分成了两个包
一个是cartographer,不带ros的内容另一个是cartographer_ros,是已ros项目构建的 这样因为带了普通cmake的包,就没法使用catkin_make了,只能使用catkin_make_isolated …
(02)Cartographer源码无死角解析-(60) 2D后端优化→ 线程池
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
树莓派编译cartographer缺pcl_msgs依赖问题
按照大神文章安装:https://blog.csdn.net/weixin_37918890/article/details/96165880
sudo apt-get update sudo apt-get install -y python-wstool python-rosdep ninja-build mkdir rosws_cartographer cd rosws_cartographer wstool init src wstool merge -t s…
0开始配置Cartographer建图和导航定位
0开始配置Cartographer
日期:12-19 硬件:激光雷达IMU
小车的tf变换: 建图配置
lua文件配置:my_robot.lua include "map_builder.lua"
include "trajectory_builder.lua"options {map_builder MAP_BUILDE…
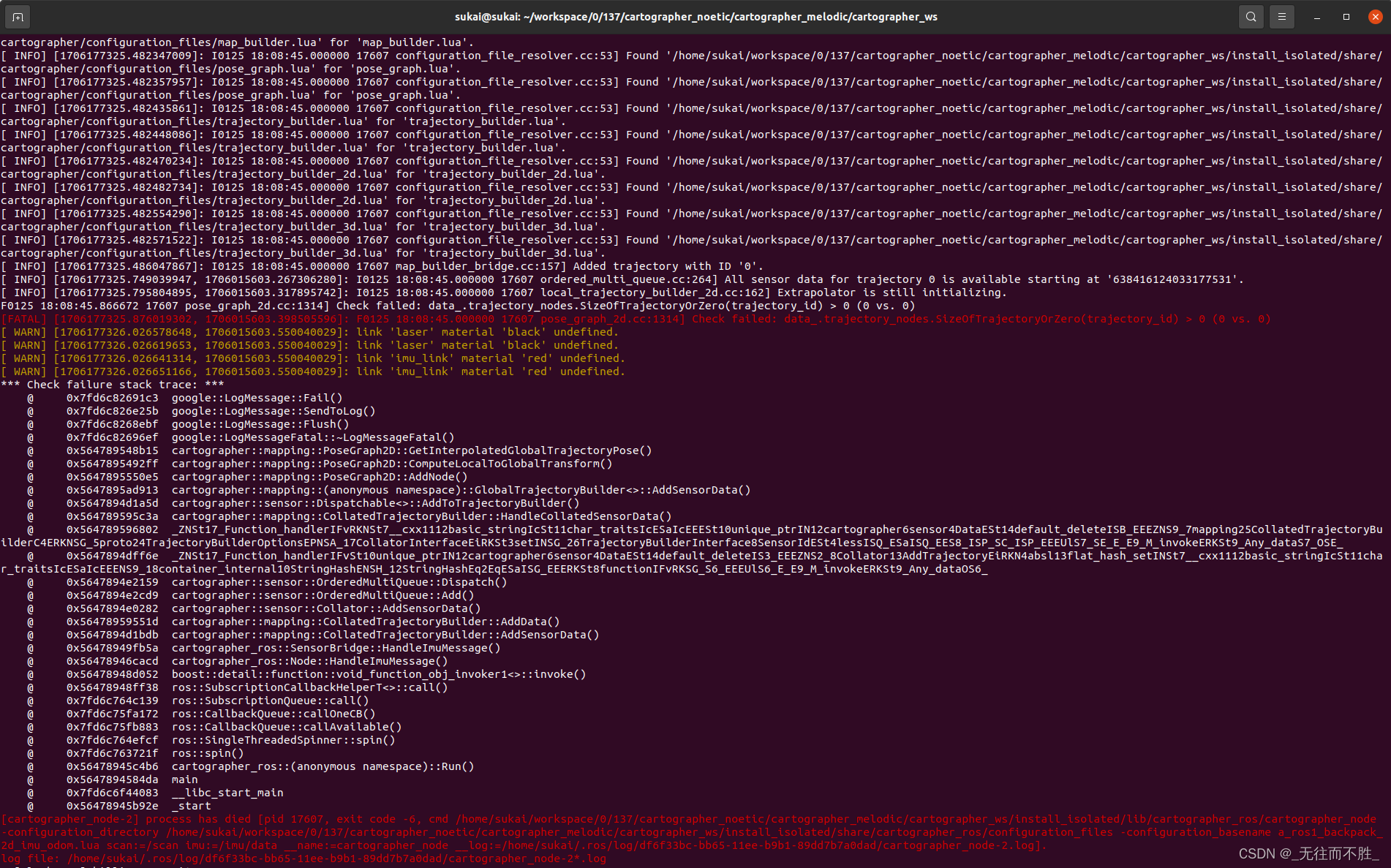
cartographer离线建图报错:data_.trajectory_nodes.SizeOfTrajectoryOrZero
cartographer离线建图报错: data_.trajectory_nodes.SizeOfTrajectoryOrZero [FATAL] [1706177325.876019302, 1706015603.398505596]: F0125 18:08:45.000000 17607 pose_graph_2d.cc:1314] Check failed: data_.trajectory_nodes.SizeOfTrajectoryOrZero(trajectory_id) &…

(02)Cartographer源码无死角解析-(44) 2D栅格地图→ProbabilityGrid 与 ProbabilityToLogOddsInteger()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(46) 2D栅格地图→RayToPixelMask()与贝汉明(Bresenham)算法
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
(02)Cartographer源码无死角解析-(71) 2D后端优化→OptimizationProblem2D::Solve() - 优化准备工作,参数块
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…

(02)Cartographer源码无死角解析-(19) SensorBridge→雷达点云数据帧处理与坐标系变换(涉及函数重载)
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …
(02)Cartographer源码无死角解析-(21) MapBuilder→AddTrajectoryBuilder()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(67) 2D后端优化→FastCorrelativeScanMatcher2D -分支定界算法1
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…
(02)Cartographer源码无死角解析-(58) 2D后端优化→PoseGraph2D::AppendNode()细节分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(26) 阻塞队列BlockingQueue(),与OrderedMultiQueue成员函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
cartographer+EAI ydlidar雷达配置过程
cartographerEAI ydlidar雷达配置过程
一、配置环境(安装驱动)
1、系统环境:ubuntu16.04ROS-kinetic
2、安装ROS-kinetic 详细说明过程 http://wiki.ros.org/kinetic/Installation/Ubuntu
二、代码程序
见附件
三、说明文档(…
木叶飞舞之【机器人ROS2】篇章_第一节、ROS2 humble及cartorgrapher安装
ROS2的humble安装
1、系统配置ubuntu 22.04
假如长期使用ros2,建议是ubuntu系统或者双系统下安装操作,不要在虚拟机中进行。ubuntu系统能用最新的大系统就用最新的,比如22.04。等明年24.04出来可以用24.04
2、humble安装
ros版本选择humb…

移动机器人激光SLAM导航(五):Cartographer SLAM 篇
参考 Cartographer 官方文档Cartographer 从入门到精通 1. Cartographer 安装
1.1 前置条件
推荐在刚装好的 Ubuntu 16.04 或 Ubuntu 18.04 上进行编译ROS 安装:ROS学习1:ROS概述与环境搭建
1.2 依赖库安装
资源下载完解压并执行以下指令 https://pa…
Cartographer中的2D扫描匹配算法
Cartographer中的2D扫描匹配算法
基础知识
Ceres Solver 入门教程 Ceres的Options详解
原理公式
待续。。。
Cartographer中代码实现详细注释
位置:cartographer_ws/src/cartographer/cartographer/mapping/internal/2d/scan_matching/ceres_scan_matcher_2d.…
cartographer,ros,路径规划近两年的工作笔记
马上转入cartographer的去ros移植了,随便记录一下研究cartographer和ros这些天来的摸鱼笔记吧虽然很多人对用ros做产品嗤之以鼻,但是我个人是不排斥的,对代码能力有限的人群来说这是产品化最快的方式!
敝帚自珍~~~继续加油~~~ 建图总结
odom 尤其是转弯的时候,存在累积误…
Cartographer源码阅读---点云数据的预处理
上一节我们已经看到了, 传感器数据是通过CollatedTrajectoryBuilder类的HandleCollatedSensorData函数 传递给 GlobalTrajectoryBuilder类的相应函数. 从GlobalTrajectoryBuilder开始, 传感器数据才真正进入到Cartographer的前后端. Cartographer最重要的数据类型就是点云, 所以…
cartographer-(0)-ubuntu(20.04)-环境安装
1.安装 ROS wiki.ros.org 1.1修改镜像源: 到网站上找与操作系统相匹配的镜像源 ubuntu | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror # 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb htt…
(02)Cartographer源码无死角解析-(55) 2D后端优化→ComputeLocalToGlobalTransform()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

Cartographer源码阅读---番外篇: Submap封装与维护
Cartographer中Submap(子图)没有被直接的调用进行维护, 而是针对2D和3D场景分别派生出子类Submap2D和Submap3D, 进行调用. 以2D为例, 为了方便维护, 又把Submap2D封装成了ActiveSubmaps2D进行维护, 其维护方式类似与滑窗, 也是只维护最近的一些数据.
1. Submap类
/*** brief …